Ambient Swarm Provider¶
Source: swarm-provider-architecture.dot — regenerate with dot -Tpng swarm-provider-architecture.dot -o swarm-provider-architecture.png.
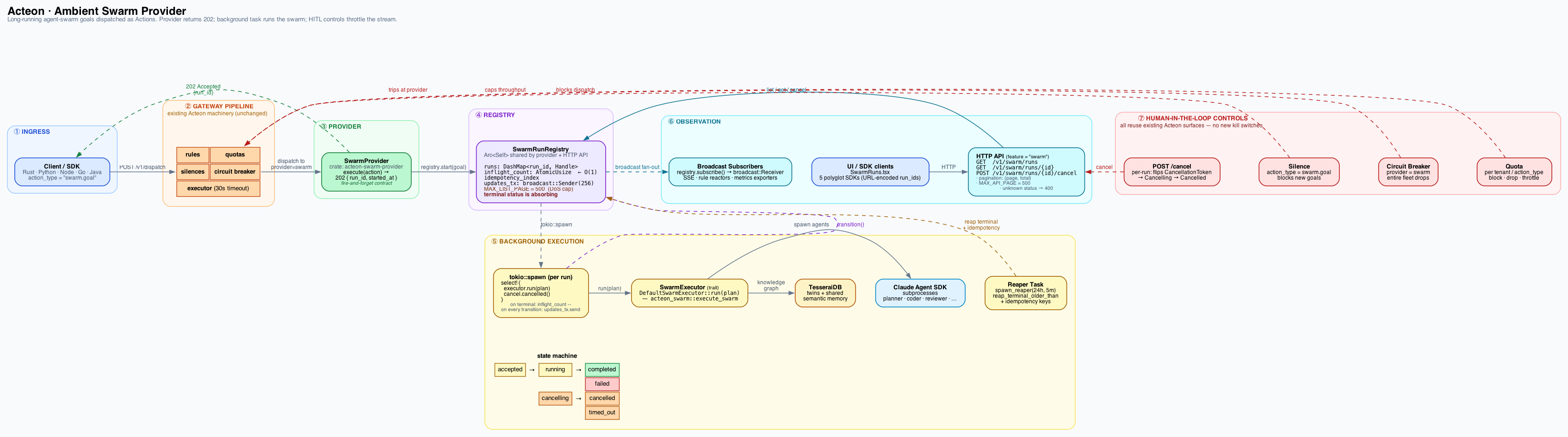
The swarm provider turns Acteon into an always-on runner for agent-swarm goals. Goals are dispatched as Actions with provider = "swarm"; the provider accepts each goal, spawns the long-running swarm in the background, and returns immediately with a run_id. Operators observe progress through a dedicated /v1/swarm/runs API and — crucially — keep full control through the same human-in-the-loop mechanisms that govern any other Acteon action (quotas, silences, circuit breakers, approvals).
This feature is compiled into the server binary behind the swarm Cargo feature flag. Builds without the feature respond to the swarm endpoints with 503 Service Unavailable.
Why the two-stage model¶
A swarm run takes minutes to hours. The gateway's dispatch pipeline enforces a 30-second per-provider timeout to protect its worker pool, so the provider cannot block waiting for the run to finish. Instead the provider returns a 202-style receipt the moment the goal is accepted, and the actual work lives on a background task tracked by a server-side registry. The receipt records the provider interaction in the audit trail as "accepted"; subsequent status transitions flow through the registry's broadcast channel and — optionally — the SSE event stream.
Configuring the provider¶
Add a [[providers]] block with type = "swarm" to your server configuration:
[[providers]]
name = "ambient-swarm"
type = "swarm"
swarm.config_path = "/etc/acteon/swarm.toml"
swarm.hooks_binary = "/usr/local/bin/acteon-swarm-hook"
swarm.max_concurrent_runs = 4
swarm.config_pathpoints at a standardswarm.tomlconsumed by theacteon-swarmcrate (roles, engine, safety, Tesserai, adversarial, eval).swarm.hooks_binaryis theacteon-swarm-hookbinary used for Claude Agent SDKPreToolUse/PostToolUse/Stophooks.swarm.max_concurrent_runscaps inflight runs. New dispatches above the cap are rejected with a provider error so the quota/DLQ pipeline can triage them.
Only one swarm provider is expected per deployment, but defining multiple is allowed — all of them share a single registry so the /v1/swarm/runs surface stays unified.
Dispatching a goal¶
The payload for a swarm goal is a pre-built plan plus an objective string:
{
"namespace": "research",
"tenant": "acme",
"provider": "ambient-swarm",
"action_type": "swarm.goal",
"payload": {
"objective": "sweep open PRs for stale reviewers",
"plan": { ... SwarmPlan JSON ... },
"idempotency_key": "nightly-sweep-2026-04-17"
}
}
Natural-language plan generation is deliberately a follow-up — the synchronous dispatch call stays fast because plan construction happens ahead of time (or on a separate worker). When a plan is supplied the provider immediately returns a SwarmGoalAccepted body carrying the run_id.
Observing runs¶
| Endpoint | Purpose |
|---|---|
GET /v1/swarm/runs | List all tracked runs, filterable by namespace/tenant/status |
GET /v1/swarm/runs/{run_id} | Fetch one run's latest snapshot |
POST /v1/swarm/runs/{run_id}/cancel | Request graceful cancellation |
Status transitions (accepted → running → completed / failed / cancelled / timed_out) are also broadcast internally through a tokio broadcast channel, so downstream components (SSE, rule reactors, metrics exporters) can subscribe directly rather than polling.
Human-in-the-loop controls¶
Every existing Acteon mechanism for shaping or halting traffic applies:
- Silences on
action_type = swarm.goalimmediately stop new goals from being accepted. Inflight runs finish normally. - Circuit breakers against the swarm provider's name stop the gateway from dispatching to it at all — a clean emergency brake.
- Quotas cap throughput per tenant (by action count or time window).
- Per-run cancel via the API flips a cancellation token observed by the background task; the run transitions through
cancelling→cancelled.
Combined, these provide tiered operator control: cancel individual runs, silence a problematic goal shape, trip the breaker if the whole provider misbehaves.
SDK support¶
All five first-party SDKs ship helpers:
| Language | List | Get | Cancel |
|---|---|---|---|
| Rust | list_swarm_runs | get_swarm_run | cancel_swarm_run |
| Python | list_swarm_runs | get_swarm_run | cancel_swarm_run |
| Node.js | listSwarmRuns | getSwarmRun | cancelSwarmRun |
| Go | ListSwarmRuns | GetSwarmRun | CancelSwarmRun |
| Java | listSwarmRuns | getSwarmRun | cancelSwarmRun |
Goals themselves are dispatched through each SDK's existing dispatch surface — there is no dedicated "dispatch swarm goal" call, just an Action with provider = "swarm".